Acerca de

NetSphere ACS
NetSphere ACS
NetSphere ACS 는 유통센터 내 각종 AGV 를 제어하는 시스템으로 알티올은 다중 모바일 로봇 제어 및 운영에 대한 기술을 보유하고 있습니다.
*ACS: AGV Control System / AGV: Automatic Guided Vehicle
[다중 모바일 로봇 제어 및 운영 기술]
-
Line Trace, Laser Guide 타입의 AGV 제어 기술
-
효율적인 Vehicle Fleet Control을 위한 Data Packet 압축 전송 기술
-
최대 120대의 Vehicle을 동시 제어하기 위한 분산 Multi-Threading 기술
-
Overhead Hoist Transport (OHT) 제어 기술
-
ROS (Robot Operating System)를 적용한 Vehicle 제어 기술
-
반도체 및 FPD FAB 환경의 CIM 소프트웨어 (SECS/GEM)
[AGV 운영 시스템의 주요 특징]
-
Transfer Function
-
인터페이스 사양 기준, 각 설비에 대한 제어 및 반송 명령 등록 (from host)
-
인터페이스 사양 기준, 각 설비의 상태 보고 (to host)
-
-
Equipment Control
-
AGV Status Monitor (AGV 상태 감시)
-
Station Status Monitor (Station 설비 상태 감시)
-
AGV Controller: AGV 동작 제어 및 반송 수행
-
auto, manual, stop, control command, traffic, transfer
-
-
Station Controller: Station 동작 제어
-
auto, manual, load, unload
-
-
-
Management End Point Service
-
각 설비에 대한 제어 속성 등록
-
command from AGV Management Console
-
-
각 설비의 상태 공유
-
Push to AGV Management Console
-
-
-
AGV Management Console
-
AGV 상태 확인 및 속성 관리 (원격 제어)
-
실시간 AGV 이동 위치 표현
-
Station 상태 확인 및 속성 관리 (원격 제어)
-
반송 진행 상태 및 완료 내역 조회
-
운영 기준 데이터 등록 및 관리
-
Ready Zone, Traffic Zone, Equipment connection info, Transfer (section & priority), Motion Definition
-
-
AGV 속성
-
Auto/Manual, Move/Pause/Resume/Stop, Traffic, Install/Remove
-
-
Station 속성
-
Auto/Manual, Load Status, Prohibit Status
-
-
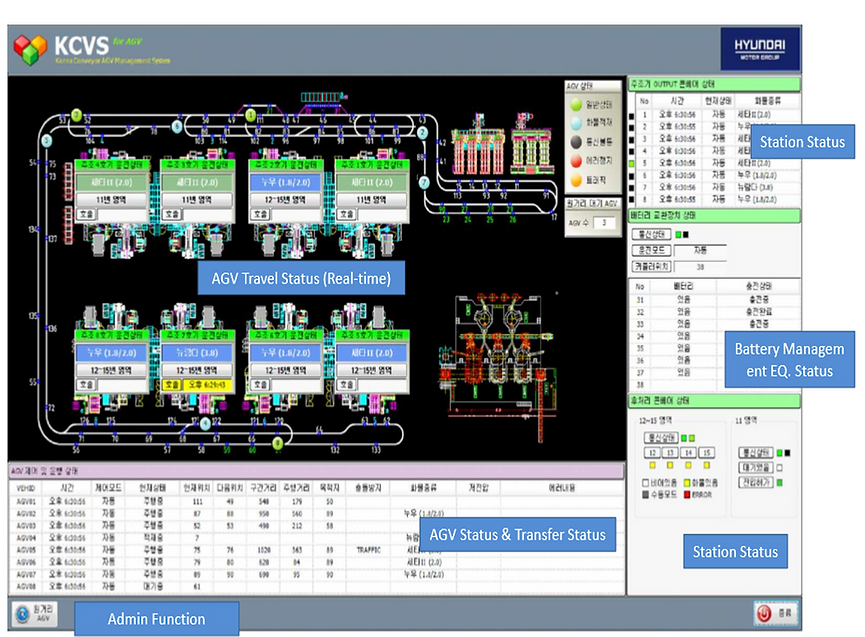
[AGV 제어 시스템 구성도]

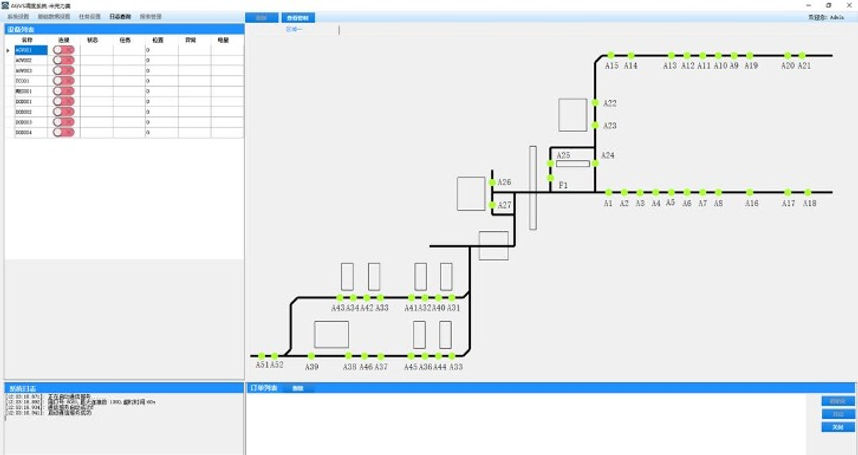
[AMR 원콜 네트워크 구성도]

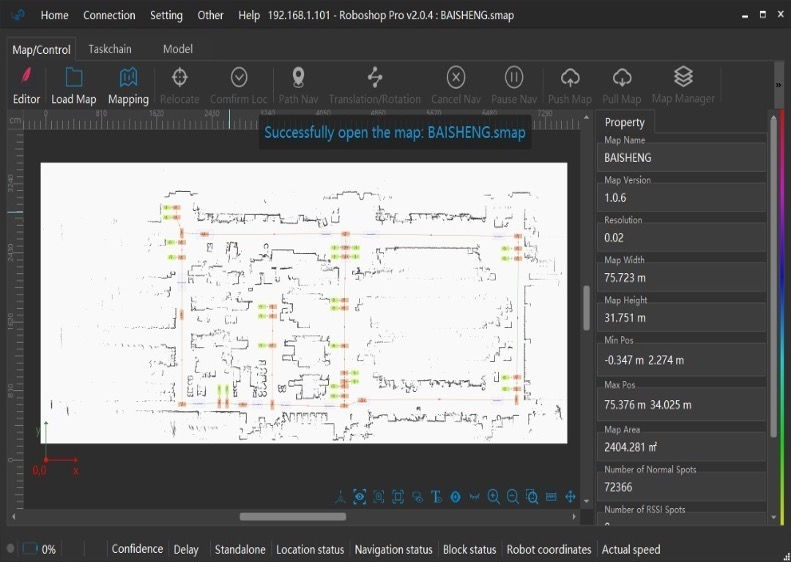
[AMR Map 프로그램: Navigation Map Tools / 자율주행 시스템]
*AMR: Autonomous Mobile Robot (자율주행로봇)
-
Global map 을 수정하기 위해 생성된 측정치의 선택 가능
-
자동 매칭 도구는 측정치를 서로 일치 시켜서 Dead Reckoning 오류를 수정함
-
보정된 측정 값으로 부터 맵이 생성됨
-
LRF 또는 3D Depth Sensor 로 부터 Global Map 작성
-
참조를 위해서 CAD 데이터를 맵위에 로딩할 수 있음.
-
수동 편집으로 마지막 미세조정 가능
-
레이저 리플렉터가 Map 상에 선택됨.
-
레이저 리플렉터가 설치되어 있다면 녹색으로 표시됨

도움이 필요하신가요?