acerca de

NetSphere ACS
NetSphere ACS
NetSphere ACS (Automated Control System) is a system developed by Altiall to control various AGVs (Automated Guided Vehicles) within a distribution center. Altiall possesses expertise in controlling and operating multiple mobile robots.
NetSphere ACS allows for the effective control and operation of AGVs in a distribution center environment. It manages tasks such as navigation, route optimization, load handling, and coordination of AGV movements. By utilizing advanced technologies and algorithms, NetSphere ACS ensures efficient and safe movement of AGVs, contributing to the overall automation and optimization of the distribution center operations.
*ACS: AGV Control System / AGV: Automatic Guided Vehicle
[Multiple mobile robot control and operation technology]
-
Line Trace and Laser Guide AGV Control: Altiall utilizes advanced control techniques for AGVs, such as line tracing and laser guidance, to ensure accurate and efficient navigation within the facility.
-
Efficient Vehicle Fleet Control: Altiall has developed data packet compression techniques to optimize the transmission of control commands and information between the central control system and the AGVs, enabling efficient fleet management.
-
Distributed Multi-Threading Technology: Altiall's system is capable of concurrently controlling up to 120 vehicles through the implementation of distributed multi-threading technology, ensuring efficient task execution and coordination.
-
Overhead Hoist Transport (OHT) Control: Altiall has expertise in controlling and operating AGVs designed for overhead hoist transport systems commonly used in manufacturing environments.
-
ROS Integration: Altiall incorporates the Robot Operating System (ROS) into its vehicle control technology, leveraging the ROS framework for communication, navigation, and coordination among multiple AGVs.
-
CIM Software for Semiconductor and FPD FAB Environments: Altiall has developed CIM software compliant with SECS/GEM standards, enabling seamless integration with the manufacturing execution system (MES) and providing efficient control and monitoring of AGVs in semiconductor and flat panel display fabrication environments.
[Key features of AGV operating system]
-
Transfer Function
-
Registraion of control and transfer commands for each equipment based on interface specifications (from host)
-
Reporting of equipment status to the host based on interface specifications (to host)
-
-
Equipment Control
-
Monitoring the status of AGVs
-
Monitoring the status of stations
-
AGV Controller: Controlling AGV operations and performing transfers (e.g., auto, manual, stop, control command, traffic, transfer)
-
Station Controller: Controlling station operations (e.g., auto, manual, load, unload)
-
-
Management End Point Service
-
Registration control attributes for each equipment (command from AGV management console)
-
Sharing the status of each equipment (push to AGV management console)
-
-
AGV Management Console
-
Checking and managing AGV status and attributes (remote control)
-
Real-time representation of AGV movement and location
-
Checking and managing station status and attributes (remote control)
-
Tracking the progress and completion of transfers
-
Registrating and managing operational criteria data (e.g., Ready Zone, Traffic Zone, Equipment connection info, Transfer section & priority, Motion Definition)
-
AGV attributes
-
Auto/Manual, Move/Pause/Resume/Stop commands, Traffic control, Install/Remove status
-
-
Station attributes
-
Auto/Manual mode, Load Status, Prohibit Status
-
-
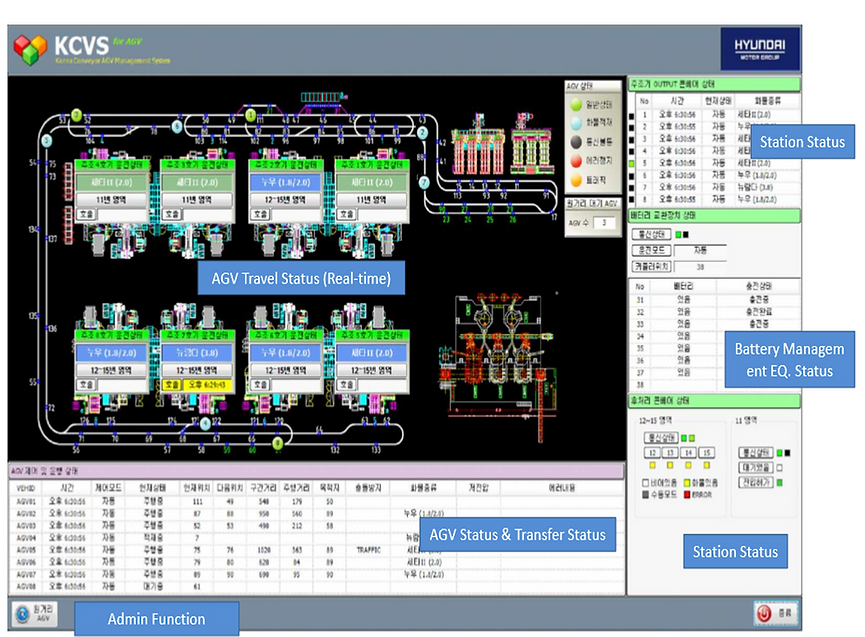
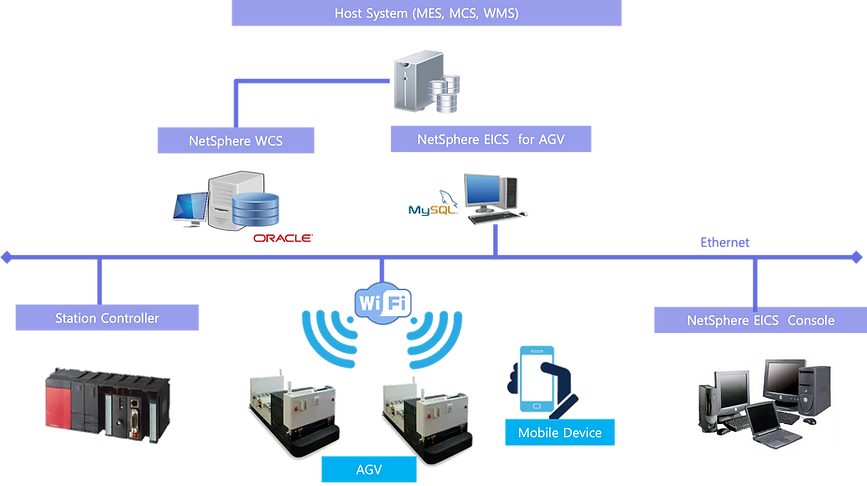
[AGV Control System Diagram]
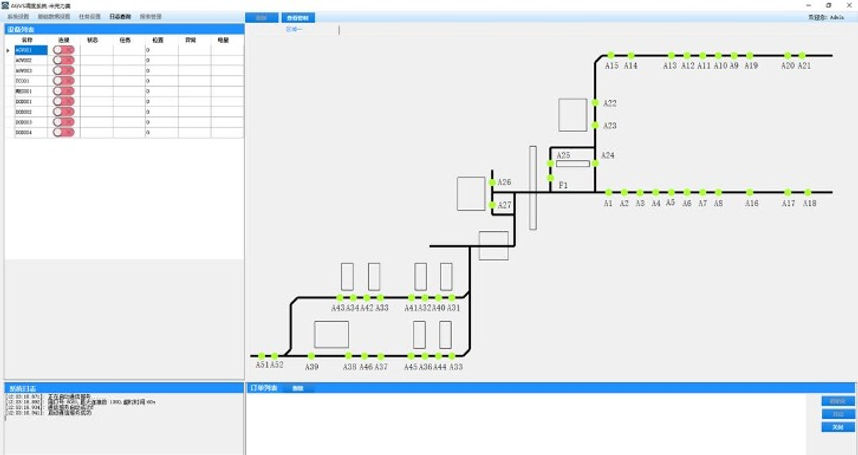
[AMR One-Call Network Diagram]

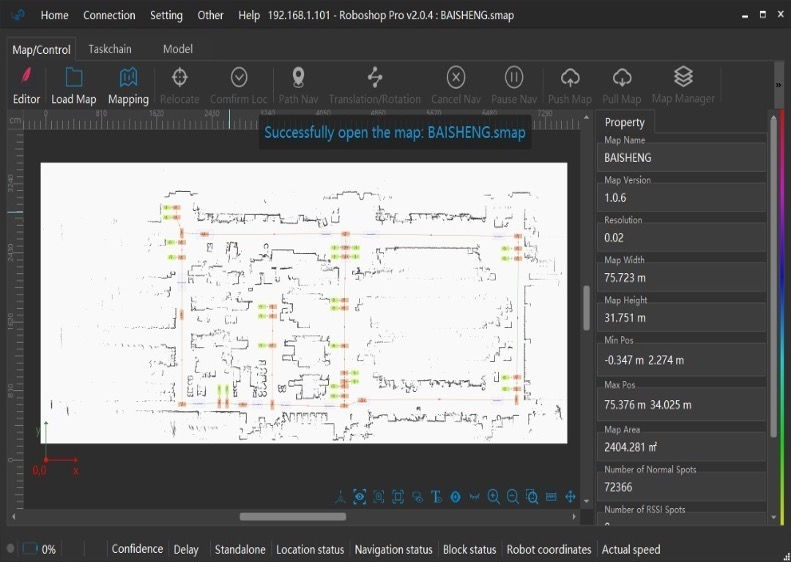
[AMR Map Program: Navigation Map Tools / Autonomous Driving System]
* AMR: Autonomous Mobile Robot
-
Selectable measured value created to modify global map
-
Automatic matching tool corrects Dead Reckoning errors by matching measurements to each other
-
Maps are created from calibrated measurements
-
Create Global Map from LRF or 3D Depth Sensor
-
CAD data can be loaded onto the map for reference.
-
Manual editing allows last minute tweaks
-
A laser reflector is selected on the map.
-
Green if a laser reflector is installed

Need Help?